
咨询电话
400-123-4567
手 机:13988999988
电 话:400-123-4567
传 真:+86-123-4567
邮 箱:[email protected]
地 址:广东省广州市天河区88号
电 话:400-123-4567
传 真:+86-123-4567
邮 箱:[email protected]
地 址:广东省广州市天河区88号

微信扫一扫
宇树机械人深度解析:驱动体系电机篇
作者:admin日期:2025/03/14 14:54浏览:
 本文援用地点:呆板人工业图谱(起源:中信建投)
本文援用地点:呆板人工业图谱(起源:中信建投)
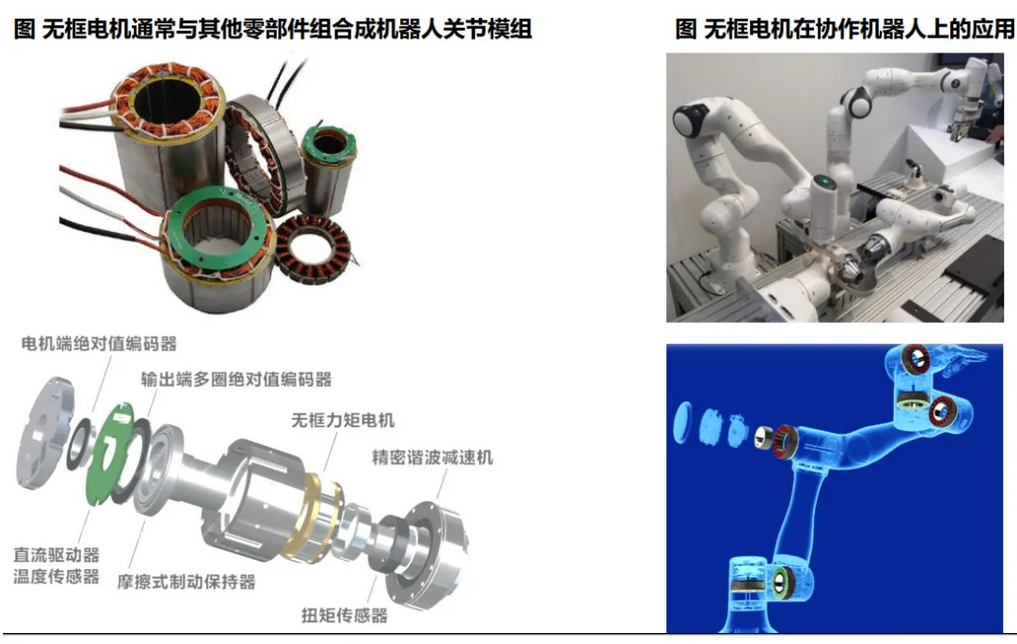
 无框电机构造构成及利用场景
无框电机构造构成及利用场景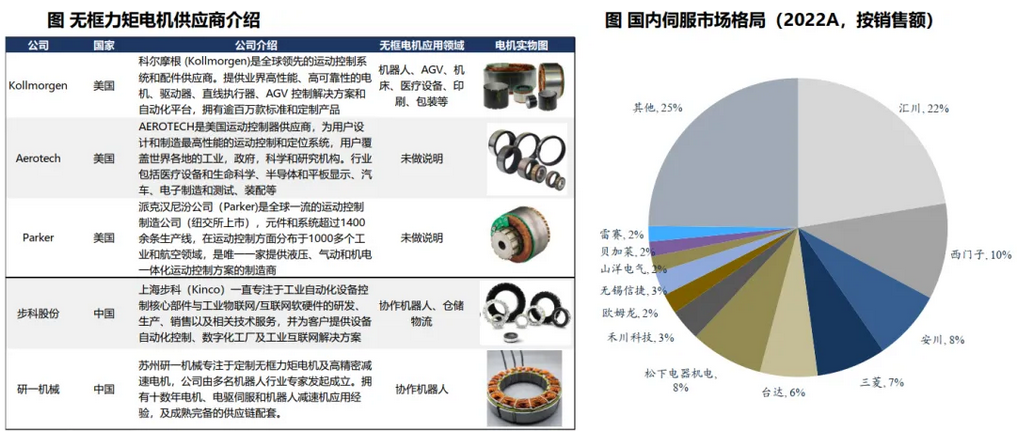 无框电机构造构成及利用场景
无框电机构造构成及利用场景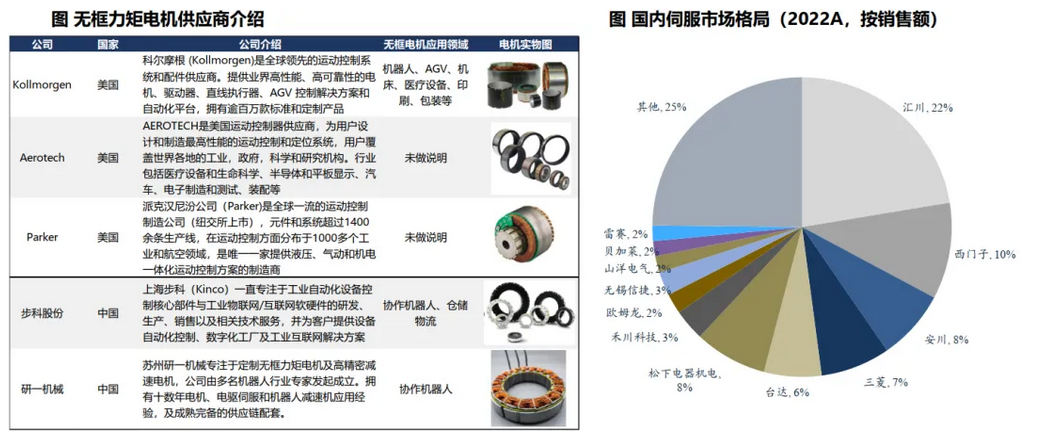 无框电机重要供给商及市场格式
无框电机重要供给商及市场格式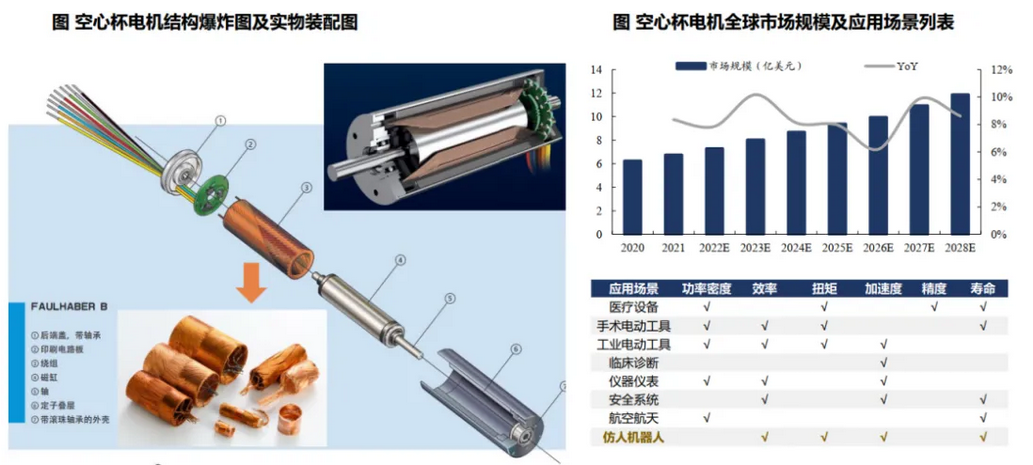 空心杯电机构造及市场范围先从人形呆板人的电机道理,散布开端与各人开端讲授!◆宇树呆板人电机散布◆下图是人形呆板人的电机,散布,合计19个关机电机,单腿枢纽为 5 自在度,单手臂为 4 自在度,再与腰部,头的电机 自在组合,能够构成人体的多个自在度举措。
空心杯电机构造及市场范围先从人形呆板人的电机道理,散布开端与各人开端讲授!◆宇树呆板人电机散布◆下图是人形呆板人的电机,散布,合计19个关机电机,单腿枢纽为 5 自在度,单手臂为 4 自在度,再与腰部,头的电机 自在组合,能够构成人体的多个自在度举措。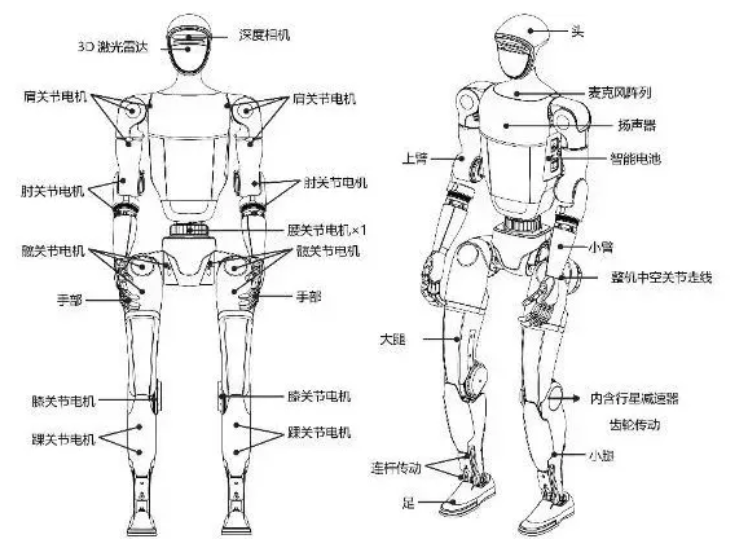 图片起源:西方财产研讨所、宇树科技官网该呆板人构造大抵能够分为上躯、左臂、右臂、左腿跟右腿五个局部,每个局部都散布有差别的枢纽电机,用于实现各个偏向的活动跟机动的操纵。■上躯局部12# 右手俯仰电机:12+16个电机用于实现上臂的高低扭转活动。16# 左手俯仰电机:12+16两个电机用于实现上臂的高低扭转活动。13# 右手转动电机:用于右手臂的阁下转动调剂。14# 右手偏航电机:用于右手的表里扭转(偏航)。17# 左手转动电机:用于左手臂的阁下转动调剂。18# 左手偏航电机:用于左手的表里扭转(偏航)。6# 躯干偏航电机:用于把持躯干的扭转,辅助呆板人实现扭动举措。■左臂局部5# 左腿膝电机:用于左腿膝盖的曲折跟蜷缩。4# 左腿俯仰电机:用于左腿的高低俯仰调剂。3# 左腿转动电机:用于左腿的阁下转动调剂。■右臂局部15# 右手肘电机:用于右手肘的曲折跟蜷缩。19# 左手肘电机:用于左手肘的曲折跟蜷缩。■左腿局部7# 左腿偏航电机:用于右腿的表里扭转(偏航)。5# 左腿膝电机:用于左腿膝盖的曲折跟蜷缩。10# 左腿踝电机:用于右腿踝枢纽的调剂。3# 左腿踝电机:用于左腿踝枢纽的调剂。(对应右腿的踝部电机)■右腿局部8# 右腿偏航电机:用于右腿的表里扭转(偏航)。2# 右腿膝电机:用于右腿膝盖的曲折跟蜷缩。11# 右腿踝电机:用于右腿踝枢纽的调剂。10# 左腿踝电机:用于左腿踝枢纽的调剂。(对应右腿的踝部电机)◆宇树呆板人电机参数◆枢纽采取了 Unitree 自研 M107 电机,具有杰出的机能跟特色。该电机的最年夜扭矩为 360N.m,髋枢纽电机扭矩 220Nm,踝枢纽 45Nm,手臂枢纽 75Nm。H1 人形呆板人 19 个自在度,行走速率 1.5m/s,潜伏活动才能 5m/s最年夜拉力(在 3.5cm 力臂等效前提下)为 10000N,采取了中空轴线的计划,使得电机在构造上愈加轻量化、紧凑化。
图片起源:西方财产研讨所、宇树科技官网该呆板人构造大抵能够分为上躯、左臂、右臂、左腿跟右腿五个局部,每个局部都散布有差别的枢纽电机,用于实现各个偏向的活动跟机动的操纵。■上躯局部12# 右手俯仰电机:12+16个电机用于实现上臂的高低扭转活动。16# 左手俯仰电机:12+16两个电机用于实现上臂的高低扭转活动。13# 右手转动电机:用于右手臂的阁下转动调剂。14# 右手偏航电机:用于右手的表里扭转(偏航)。17# 左手转动电机:用于左手臂的阁下转动调剂。18# 左手偏航电机:用于左手的表里扭转(偏航)。6# 躯干偏航电机:用于把持躯干的扭转,辅助呆板人实现扭动举措。■左臂局部5# 左腿膝电机:用于左腿膝盖的曲折跟蜷缩。4# 左腿俯仰电机:用于左腿的高低俯仰调剂。3# 左腿转动电机:用于左腿的阁下转动调剂。■右臂局部15# 右手肘电机:用于右手肘的曲折跟蜷缩。19# 左手肘电机:用于左手肘的曲折跟蜷缩。■左腿局部7# 左腿偏航电机:用于右腿的表里扭转(偏航)。5# 左腿膝电机:用于左腿膝盖的曲折跟蜷缩。10# 左腿踝电机:用于右腿踝枢纽的调剂。3# 左腿踝电机:用于左腿踝枢纽的调剂。(对应右腿的踝部电机)■右腿局部8# 右腿偏航电机:用于右腿的表里扭转(偏航)。2# 右腿膝电机:用于右腿膝盖的曲折跟蜷缩。11# 右腿踝电机:用于右腿踝枢纽的调剂。10# 左腿踝电机:用于左腿踝枢纽的调剂。(对应右腿的踝部电机)◆宇树呆板人电机参数◆枢纽采取了 Unitree 自研 M107 电机,具有杰出的机能跟特色。该电机的最年夜扭矩为 360N.m,髋枢纽电机扭矩 220Nm,踝枢纽 45Nm,手臂枢纽 75Nm。H1 人形呆板人 19 个自在度,行走速率 1.5m/s,潜伏活动才能 5m/s最年夜拉力(在 3.5cm 力臂等效前提下)为 10000N,采取了中空轴线的计划,使得电机在构造上愈加轻量化、紧凑化。相关文章
- 2025/03/14宇树机械人深度解析:驱动体系电机篇
- 2025/03/13剧集游戏推举哪个 十大耐玩剧集游戏排行
- 2025/03/13尊界告状赛车星冰乐:要求报歉并抵偿
- 2025/03/12vivo Y29s宣布 天玑6300+720P LCD屏幕 支撑T